

Guidance Embedded Navigator Integration Environment (GENIE)
PI: Rick Loffi, Draper Laboratory Inc.
PI: Rick Loffi, Draper Laboratory Inc.

- TA04 Robotics, Tele-Robotics and Autonomous Systems
- TA05 Communication and Navigation
- TA09 Entry, Descent and Landing Systems
Demonstrated performance of the sRLV to fly simulated lunar and planetary approach trajectories will extend the vehicle capabilities to support future lunar and planetary payload demonstrations, while demonstration of the Precision Landing AGNC is the first step in an incremental approach to demonstrated autonomous landing and hazard avoidance technologies. Finally, the inclusion of the AGNC capability will enable future technology demonstration across a broad range of the Technology Roadmaps, e.g., demonstrating Human System Collaboration systems for autonomous landing, demonstrating off-vehicle crew training and/or mission operations training for interaction with robotic vehicles.
Successful completion of the adaptation and flight test objectives will mature the precision landing technology to TRL 6 by demonstrating closed-loop AGNC system flight performance in a relevant environment. Additionally, the overall capability of the sRLV to support future test demonstrations with representative lunar or planetary trajectories will be matured to TRL 9.
Precision landing AGNC is applicable to future NASA landing missions to the Moon or planets, to future proposed precursor landing missions, commercial landing missions and potential Near-Earth Object missions. Previous efforts on each of these missions have identified the benefits of precision landing and hazard avoidance capability, but have all avoided implementation due to risk.
Draper proposes to leverage the GENIE hardware and ALHAT Precision Landing AGNC software to mature this critical cross-cutting technology through flight demonstrations. The GENIE provides a mature capability that through adaptation can successfully and safely perform closed-loop flight demonstrations. Draper, NASA and Masten Space have already initiated efforts to adapt the payload for flight.
The AGNC software and GENIE hardware is ready for flight. Significant simulation and analysis have been performed on the Precision Landing AGNC software to demonstrated closed-loop functionality and performance of all of the proposed trajectories including the simulated lunar trajectory. The GENIE hardware and software system has undergone significant testing including preliminary open loop flight testing. Draper has already initiated an effort to integrate the precision landing AGNC with the Masten Space sRLV to demonstrate the feasibility of performing closed-loop flight demonstrations.

5 flight campaigns have been performed to date:
Campaign 1+2 (GENIE C1+C2): http://www.youtube.com/embed/oO3h8clmU7U
Flight profiles C1 and C2 were completed to certify the vehicle with the GENIE payload in control. C1 was an open loop free flight campaign performed in November 2011 and C2 (video) was a closed loop tethered hop campaign completed in December 2011.
Campaign 3 (GENIE C3): http://www.youtube.com/embed/cT0GFYexSHg?rel=0
C3 was a closed loop demonstration of the GENIE payload commanding a 50m free flight pad-to-pad hop. It occurred on February 2, 2012. More information about this campaign is available at NASA and at Draper Labs.
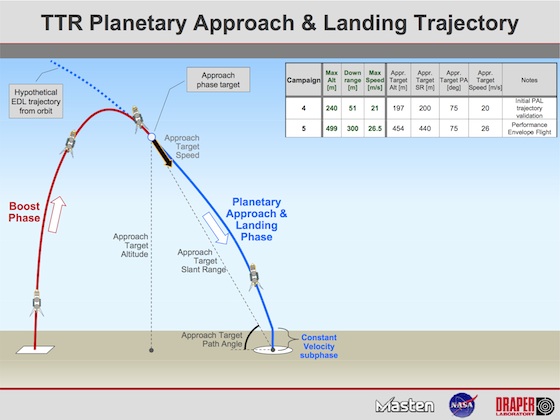
Campaign 4+5 (GENIE C4+C5): http://www.youtube.com/embed/xMQeNIqRyZw
C4 and C5 (video) flight profiles were successfully flown on Friday March 22 and Monday March 25, 2013 respectively. The objectives of these 2 flights was to expand the envelope both in height and down range distance as explained in this GENIE test flight campaign package. More information about the campaign is available in this NASA press release.
Technology Details
-
Selection DateAFO1 (May 2011)
-
Program StatusCompleted
- 5 sRLV
Development Team
-
PIRick Loffi
-
Organization
-
SponsorDraper Laboratory
-
PartnersNASA Johnson Space Center