

Box-of-Rocks Experiment II: Morphology and Sampling of Asteroid Regolith Simulants in Microgravity
PI: Daniel Durda, Southwest Research Institute - Boulder, Alex Parker (Co-I), Southwest Research Institute - San Antonio
PI: Daniel Durda, Southwest Research Institute - Boulder, Alex Parker (Co-I), Southwest Research Institute - San Antonio
- TA04 Robotics, Tele-Robotics and Autonomous Systems
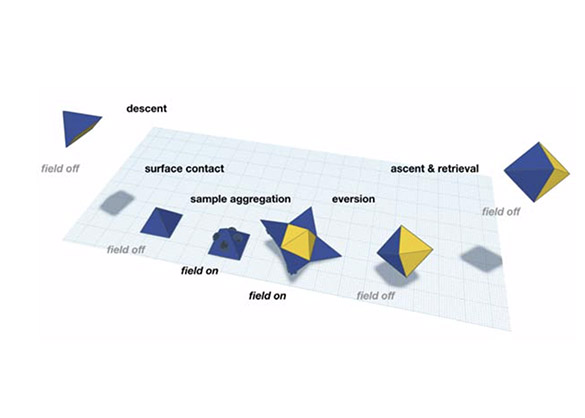
Surface science operations and sample return from small asteroids present substantial technical challenges. Some mission architectures require that the primary spacecraft conduct the sample collection maneuver, making the operation high risk and allowing for only one sample site. This technology is an anchoring and sampling architecture for the surfaces of small asteroids that could enable low-risk surface operations and sampling from multiple sites on any given target body. One objective of this experiment is to fly high-fidelity primitive asteroid regolith simulant to examine morphology after settling in milligravity conditions. A second objective is to provide a longer duration applied operational test with the same regolith simulant that has already been tested with prototype hardware in parabolic flight.
If successful in demonstrating the full sequence of exposing a magnetized sampler to an asteroid regolith analog in a long-duration, zero-gravity, vacuum environment, the test would show that the technology provides a safe, low-power means of anchoring to asteroid surfaces or collecting regolith samples. Testing also seeks to demonstrate that the technology’s anti-jamming mechanism is sufficient to enable closure of the petals if too much sample is collected.
• NASA small body robotic spacecraft for surface science operations
• Human exploration missions
• Commercial in-situ resource utilization
Technology Details
-
Selection DateTechFlights19 (Oct 2019)
-
Program StatusActive
- 0 sRLV
Development Team
-
PIDaniel Durda
-
PI Organization
-
Co-IAlex Parker
-
Co-I Organization
-
SponsorSwRI